18
年专注高精度注塑机、压铸机检测 仪器及传感器综合服务商

-服务热线:0755-27327081
年专注高精度注塑机、压铸机检测 仪器及传感器综合服务商
-服务热线:0755-27327081

 深圳中研塑力科技有限公司
深圳中研塑力科技有限公司  2022-11-09
2022-11-09
应变片的工作原理,当导线由于伸缩引起的长度变化,电阻也随之成比例变化。深圳中研塑力科技有限公司的锁模力传感器是基于应变片工作原理设计而成。
应变片产生的输出信号单位是 mV/V,再利用信号放大器转换成应变量:1 microstain=1x 10‐6 m/m=ε
例如315 microstrain= 0.315mm 的变形量/m。
根据传感器测量的拉杆应变量,利用下面公式精确计算锁模力:
基本公式(虎克定律):σ=Exε. σ= F/A, 所以 F=AxExε [N]
其中 A=拉杆横截面积[mm2]
E=杨氏模量[N/ mm2],钢铁的杨氏模量值是210 000 N/ mm2
ε=1x 10‐6[‐]
对于测量注塑机/压铸机拉杆应变而言,上面公式成立需要满足以下两个条件:
1.测量应变是均匀分布区域的应变。为避免测量存在应变非均匀分布区域的应变,传感器应该安装在离模板或活动部件大约是拉杆直径1倍以外区域。图1中对比了直径相同与直径不同的两个拉杆靠近模板位置的应变分布形态。
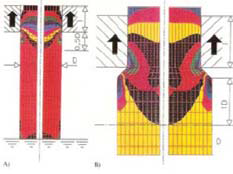
图1 .传感器不能安装在应变非均匀分布的区域。a)直径均一拉杆,大于直径0.5倍的区域内应变非均匀分布;b)直径非均一拉杆,大于直径1倍区域内应变非均匀分布。
2、一根拉杆上需要安装两个传感器,并且两个传感器安装位置相反。安装两个传感器目的是补偿拉杆本身的弯曲变形。两个传感器测量值的平均值就是拉杆实际应变值。如果只安装一个传感器,测量结果肯定不正确,因为拉杆始终存在弯曲变形,一个传感器无法补偿拉杆弯曲变形。

在线咨询(提供连接过来)
统一服务热线
0755-27327081